Tantalus Synthesis (2005)
Photo credit: Jessica Field
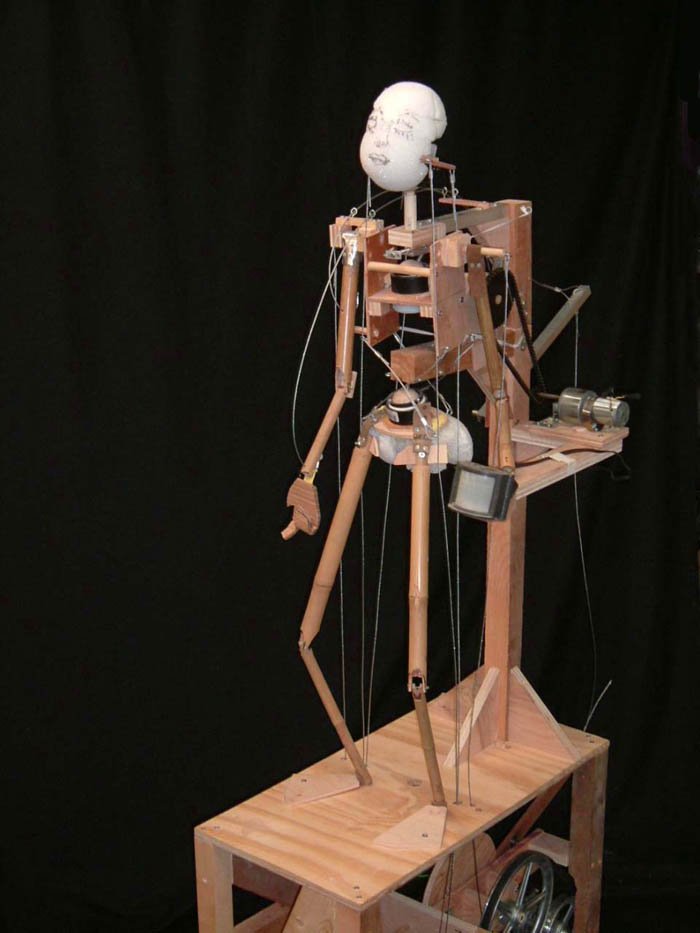
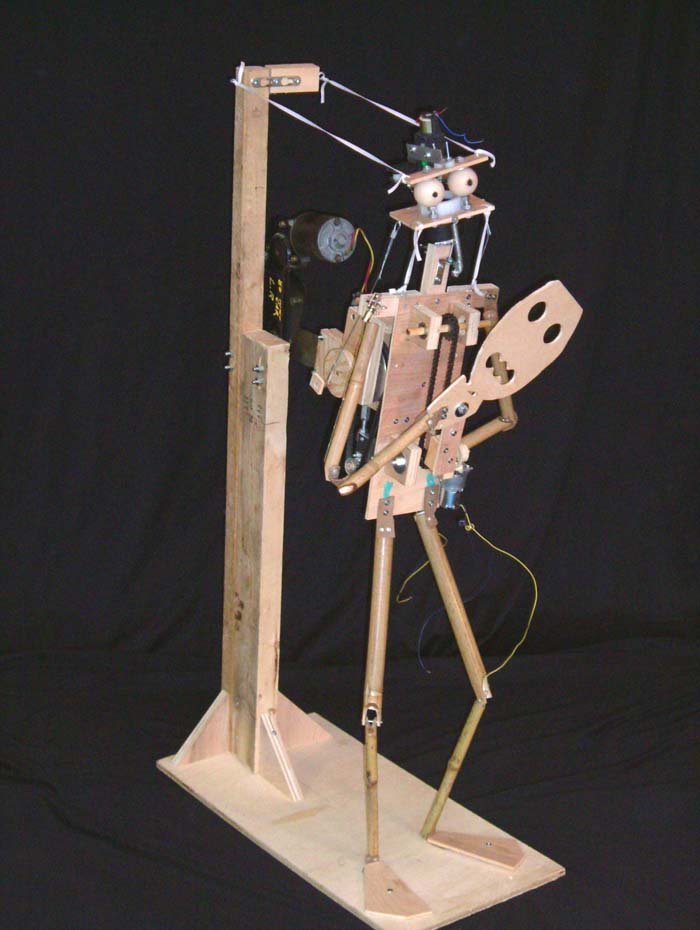
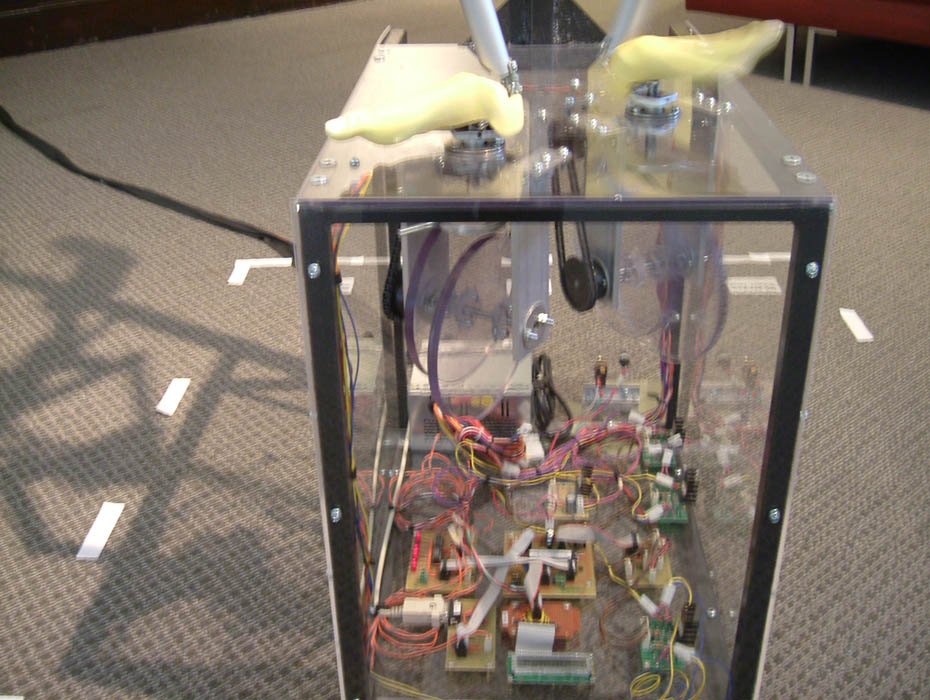
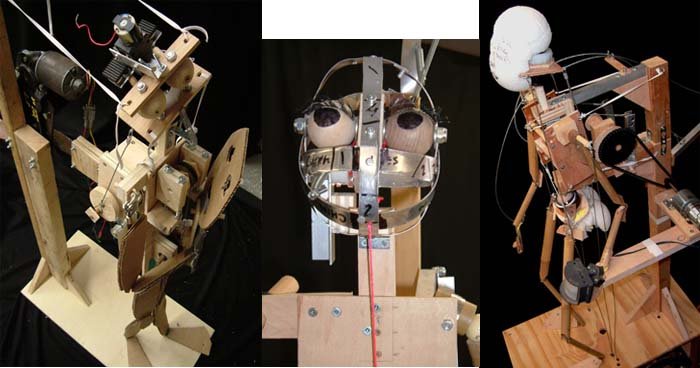
This installation is comprised of five electronically networked robots that interact with the viewer. It was built in colaboration with Puppeteer artist Shawna Reiter who is the co-director of Clunk Puppet Lab.
The puppets are designed to have the goal of attaining as much motion as possible. The viewer’s motion triggers the robot's motion, via a motion sensor. Each robot is programmed with their own rules of conduct based on their characters' ideal way of attaining motion. The robots are programmed to measure success and failure based on the length of time that the viewer moves in front of them and on how much attention other robots receive from the viewer.
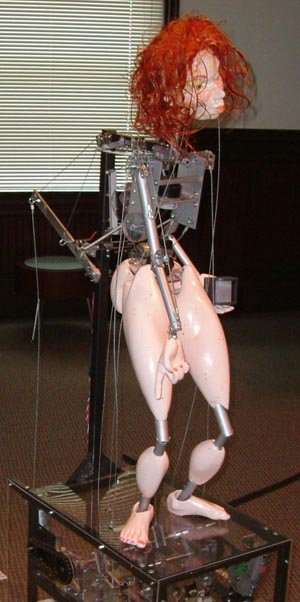
When the viewers' response fulfills their desire for motion, the puppets are successful, or conversely, they will experience a conflict with their ideology. The robots are dependent on the viewer's responses to prove to themselves that their rules of conduct are correct. This personality flaw confines them to constantly measure their success and failure. It is this act of obsessing over their influences on the audience they are unable to ever experience a feeling of content.
All the robot characters exist in an environment that is socially competitive in that they all rely on the viewer to satisfy their desire. When the viewer engages with the piece, they realize over time that it is impossible to satisfy all the robots' desires for motion, since the robots are focused on rating their achievement in attaining motion. In viewing all of the puppets at once, the viewer sees them perpetually shifting from a sense of success to the experience of failure. Thus all of those involved in an environment conducive to competition and absorbed by the desire for success become trapped in an eternal conflict between their environment and themselves.